

四脚ロボット開発の宿願だった低遅延通信への挑戦
---クフウシヤ様はなぜ、「四脚」ロボットの開発に着手されたのでしょうか。
大西 威一郎氏(以下、大西氏):当社は創業以来、「普通のロボット開発ではつまらない」という想いから、自律移動するロボットにこだわって開発を続けてきました。
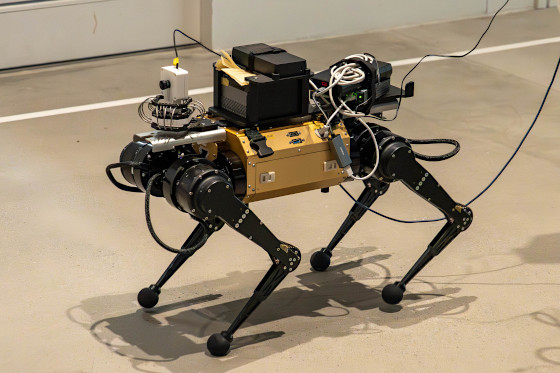
当初はタイヤ型やキャタピラ型のロボットを主に開発してきました。しかし、歩道の段差や階段、不整地など、車両型のロボットではどうしても越えられない物理的な限界を感じることが多くなってきたのです。その限界を突破するために、私たちは3年ほど前から四脚の犬型ロボットの開発に着手しました。
四脚ロボットの活用シーンとしては、人が立ち入れないような過酷な環境や警備・点検といった領域が想定されます。こうした現場では、ロボットが自律的に動く部分に加えて、遠隔からの映像確認や操作介入が求められます。そこで大きな課題となったのが、通信、特に映像の送受信でした。

小長谷 健太氏(以下、小長谷氏):当社は神奈川県相模原市の「さがみロボット産業特区」と、福島県南相馬市の「福島ロボットテストフィールド」という、2つの国家戦略特区に拠点を構えています。2023年、福島の拠点で映像伝送の実証実験を行ったことがあるのですが、これが驚くほど難しく、非常に苦労しました。
当社は映像伝送に関する知見が浅く、実証実験ではRTSPという方式を用いて映像伝送を実施しました。しかし実験を開始してしばらくすると、遅延が4秒、5秒とどんどん大きくなっていったのです。これでは、まともな遠隔操縦は不可能です。当社の持つ技術やノウハウでは、明確な打開策が見つけられませんでした。

大西氏:物事が動いたのは、産学官連携でロボット技術の開発と人材育成を行う「会津デュアルウェアロボットコンソーシアム(ARDAC)」主催のシンポジウムです。2024年のシンポジウムにて、ネットワンシステムズがWi-FiとLocal5Gの性能比較のデモンストレーションを行ったのです。
Wi-Fi環境で発生する遅延に苦しんでいた当社にとって、その映像は衝撃的でした。その後、ネットワンシステムズに声をかけ、一度当社の開発拠点に来てもらったのです。
井上 直也(以下、井上):2025年7月、初めてクフウシヤの開発拠点にお邪魔しました。ロボット開発の専門家集団として、ロボットをどう活用し、どう社会に貢献していくかを真剣に追求されている姿にとても心打たれました。
そして、訪問時に「通信がうまくいかない」という課題を伺い、通信のプロのはしくれとして、「一緒に問題解決をしなければならない」と強く感じたのです。また、弊社もロボットの可能性は感じていましたが、具体的な活用方法についてはまだ模索している段階でした。
そのため、クフウシヤ様との協業を通じて、ロボット産業において自分たちがどのような貢献ができるかを追求できると感じ、実証実験を行う流れとなりました。

目標値を大幅に超える成果が証明した共創の価値
---プロジェクトが始動し、具体的な検証はnetone valleyで行われたそうですね。Local5Gの環境でロボットとの通信を実施した際の、率直な感想をお聞かせください。
伊藤 克幸氏(以下、伊藤氏):まず驚いたのは、通信が「途切れない」ことでした。遠隔操縦において、たとえ一瞬であっても通信が途切れることはオペレーターにとって大きなストレスになります。「ここで切れてほしくない」という一番重要な瞬間に映像が止まってしまえば、致命的な事態につながりかねません。
今回、Local5Gの環境で実際にロボットを動かしてみて、基地局をまたぐローミングの際にもほとんど途切れが発生しないことを体感し、「これは遠隔操縦に非常に向いている」と強く感じました。遅延時間が短いという数値的な成果以上に、この安定性にはありきたりな言葉ですが、とても感動しました。
---ネットワンシステムズ側ではどのような工夫がなされましたか?
岡﨑 絢哉(以下、岡﨑):今回のプロジェクトでは、基地局に細かいチューニングを施しました。端末から基地局にリクエストを送ると、基地局側でスケジューリングが行われ、一定のリソースが割り当てられます。そのリクエストから割り当てまでの間隔を極めて短く設定することで、端末が通信できる機会を可能な限り増やしたのです。
このチューニングによって、アプリケーションレベルで明確な遅延の低減が確認できました。

山本 和弘(以下、山本):実際に4Kの高精細映像を伝送すると、想定していたよりも映像に乱れやコマ落ちが見られました。Local5Gの環境なので、もっと良い映像が安定して伝送できるはず。要因を一つずつ検証していく過程で、電波を受信するルーターの処理能力が、4Kのような大容量データのストリーミングに追いついていないのではないかと考えました。
そこで、ルーターを産業用L5G端末に切り替えてみたところ、映像品質が劇的に向上しました。超低遅延のストリーミングの環境において、端末の性能が極めて重要な要素であることが改めて浮き彫りになりました。

---さまざまな工夫や苦労を重ねた結果、どのような検証結果を得られましたか?
大西氏:当社では、四脚ロボットの事業化に必要不可欠なスペックとして、映像伝送の遅延は500ms(ミリ秒)以下、操作コマンドの伝送遅延は100ms以下という目標を掲げていました。
そして今回の実証実験では、4Kの高精細映像伝送では平均で321msから358msという数値を安定して記録しました。これは、実用化の推奨値とされる300ms台を達成したことになり、非常に大きな成果です。
操作コマンドの伝送に関しても、平均66msを達成。これは当社の社内Wi-Fi環境での測定値(平均79.5ms)と比較して、約17%も高速化されたことになります。
小長谷氏:前回の実証実験ではRTSP方式を用いて遅延に苦しみましたが、今回はその反省を活かし、より低遅延な映像伝送が可能なWebRTCを採用して検証に臨みました。今回の結果を受けて、WebRTCとLocal5Gの組み合わせは、我々が抱えていた課題に対する最適解であると確信しました。個人的に、通信速度は「速ければ速いほど良い」と考えているので、この結果には非常に満足しています。
井上:ロボット開発には、常に「物理的な制約」と「経済合理性」という二つの大きなジレンマがつきまといます。巨額な予算を投じれば、高性能なカメラとAI処理用のコンピュータを搭載することは可能です。しかし、ロボットは限られたサイズと重量の中で動かなければならず、巨大なコンピュータを積めば動けなくなってしまいます。
かといって、高価な部品ばかりを使えば社会実装できる価格帯からかけ離れてしまう。このジレンマの連続が、ロボット開発の難しさと考えています。
一方、物理的な制約を超える可能性を秘めているのが、通信です。ロボット本体には最小限の機能だけを残し、高価なコンピュータ処理は通信を介して遠隔地のリソースに任せる。そうすれば、ロボットはもっと小型・軽量になり、コストも下げられます。
高精細な映像をほとんど遅延なく遠隔地に伝送できたという事実は、「処理の外部化」というアーキテクチャの実現可能性を大きく前進させるものだと考えています。
国産ロボットが社会を支える未来へ
---実証実験を経て、四脚ロボットの展望をどのように考えていますか?
大西氏:アメリカや中国をはじめ、世界中には非常に優れた四脚ロボット製品が存在し、低コスト化も進んでいます。正直なところ、我々が今から同じ土俵で機能や性能、コストを競っても勝ち目はないでしょう。
しかし、ビジネスとして成り立つニッチなニーズ、特に「国産でなければならない」という需要は必ず存在すると信じています。
一番分かりやすい例が、私たちが貢献したいと強く願っている福島第一原発の廃炉作業です。こうした国家的なプロジェクトでは、経済安全保障やセキュリティ、あるいはロボットが収集・学習するデータの取り扱いといった観点から、間違いなく国産技術が求められます。たとえ機能や性能で海外製品に劣ったとしても、絶対に越えられない一線がそこにはあるのです。
そうした重要な領域でこそ、当社の技術を役立てたいと考えています。ネットワンシステムズとの実証実験で得られた通信技術のノウハウは、厳しい環境下でロボットを運用する上で、極めて強力な武器になると確信しています。
---ネットワンシステムズは、今回の共創を通じてどのような未来を描いていますか?
山本:Local5Gという弊社の通信インフラで、クフウシヤ様のような素晴らしいアプリケーションが動くことで、自社の持つ技術の価値を再認識できました。Local5Gは、Wi-Fiとの比較がされやすい屋内よりも、むしろ倉庫や工場、プラント、電力設備といった屋外利用のシーンで求められています。そうした場所では、人の代わりに点検や作業を行うロボットの活躍が期待されています。
弊社は通信インフラの提供を通じて、そういったお客様の課題解決に貢献していきたい。そのためにも、ロボットという領域で深い知見を持つクフウシヤ様との連携は、今後ますます重要になると感じています。
大西氏:ロボット産業は現在、ドローンによる情報収集といった領域が先行していますが、これからロボットが物理的な作業を行う「フィジカルAI」の時代が間違いなくやってきます。当社の四脚ロボットに人のような腕が2本つけば、バルブを閉めたり、スイッチを押したりといった複雑な作業も可能になります。そう遠くない未来、ヒューマノイドロボットも普及していくでしょう。
しかし、一台何百万円もするコンピュータを搭載したヒューマノイドを大量に配備するのは現実的ではありません。ロボットはあくまでエッジデバイスとして機能し、高度な判断や処理は通信を介して行う。そんな未来が、おそらく3年後、5年後には現実のものとなっているはずです。その時、ネットワンシステムズとの共創で培った知見は計り知れない価値を持つことになります。
「通信」という要素は、当社の事業の根幹を支える非常に重要なテーマです。そして、通信と切っても切れない関係にある「セキュリティ」の分野もまた、今後ますます知見を深めていかなければなりません。両分野で卓越した技術を持つネットワンシステムズとは、今後も心強いパートナーとして共創の関係を続けていきたいです。
そして、当社のように通信やセキュリティ分野で悩みを抱えている他社の方々にも、ネットワンシステムズの魅力を伝えていければと思います。
井上:弊社にとっても、今回のプロジェクトは大きな気づきを与えてくれました。スマートフォンやWi-Fiが普及し、通信は当たり前の技術になりましたが、まだまだ専門性が活かせる領域がたくさんあるのだと再認識させられました。お客様のユースケースに合わせて最適なネットワークを提供していく、その重要性を改めて感じています。
クフウシヤ様と共に、ロボットが当たり前に社会で活躍する未来を創り上げていけるよう、これからもさまざまなプロジェクトでご一緒できたら、これほど嬉しいことはありません。

