
皆様の企業では、生成AIのビジネス活用はどの程度進んでいるでしょうか。サイバー空間でテキストや画像を生成するフェーズから、AIはいよいよ「物理世界(フィジカル)」へとその領域を広げようとしています。先日開催されたNVIDIAGTC2026等のグローバルカンファレンスでも最大の焦点となったこの「フィジカルAI」は、単なるバズワードではなく、企業の現場とIT環境を根本から変革するキーテクノロジーです。
今回は、この新たな波がもたらすビジネスの可能性について、弊社のエキスパートである伊藤と猪子に話を聞きました。
今回のインタビュイー



目次
はじめに:フィジカルAIとは何か?企業に迫る「新たな波」
---まずは前提として、「フィジカルAI」とは一体どのようなものなのか教えてください。
伊藤:一言で言えば、AIが「手足を持ち、実際のモノを動かし始める世界観」だと捉えています。自動運転などもこれに含まれますね。これまで、ChatGPTに代表されるようなAIの進化は、あくまでサイバー空間(コンピューターの中)に閉じたものでした。しかし今、この高度なAIがフィジカル側に繋がり、実世界のロボットや機械を直接動かすフェーズに入っています。このトレンドを牽引しているのが「Sim-to-Real(シムトゥリアル)」の技術、そして「ヒューマノイド(人型ロボット)」領域の目覚ましい進展です。従来の産業用ロボットの枠を超え、二足歩行ロボットなどが新たな価値を生み出し始めています。
猪子:現場で働く皆様の視点から少し分かりやすく表現すると、フィジカルAIは新たな「パートナー」になり得る存在です。
例えば、オフィスでの備品管理や受付対応、あるいは施設内での軽作業など、物理的な動きを伴う定型業務はあらゆる業種に存在します。ここにヒューマノイドのようなロボットが導入されれば、これまで人が時間を割いていた、あるいは外部に委託していた物理的なタスクをロボットが肩代わりしてくれる可能性があります。エンタメの現場から企業のオフィス、製造・物流の最前線まで、多様な場所でAIが物理的なサポートを行う時代がすぐそこまで来ています。
---なるほど、サイバー空間のAIが現実の物理的な業務を担うようになるのですね。それを踏まえて、伊藤さんの観点で「企業におけるフィジカルAI」を定義するとどうなりますか?
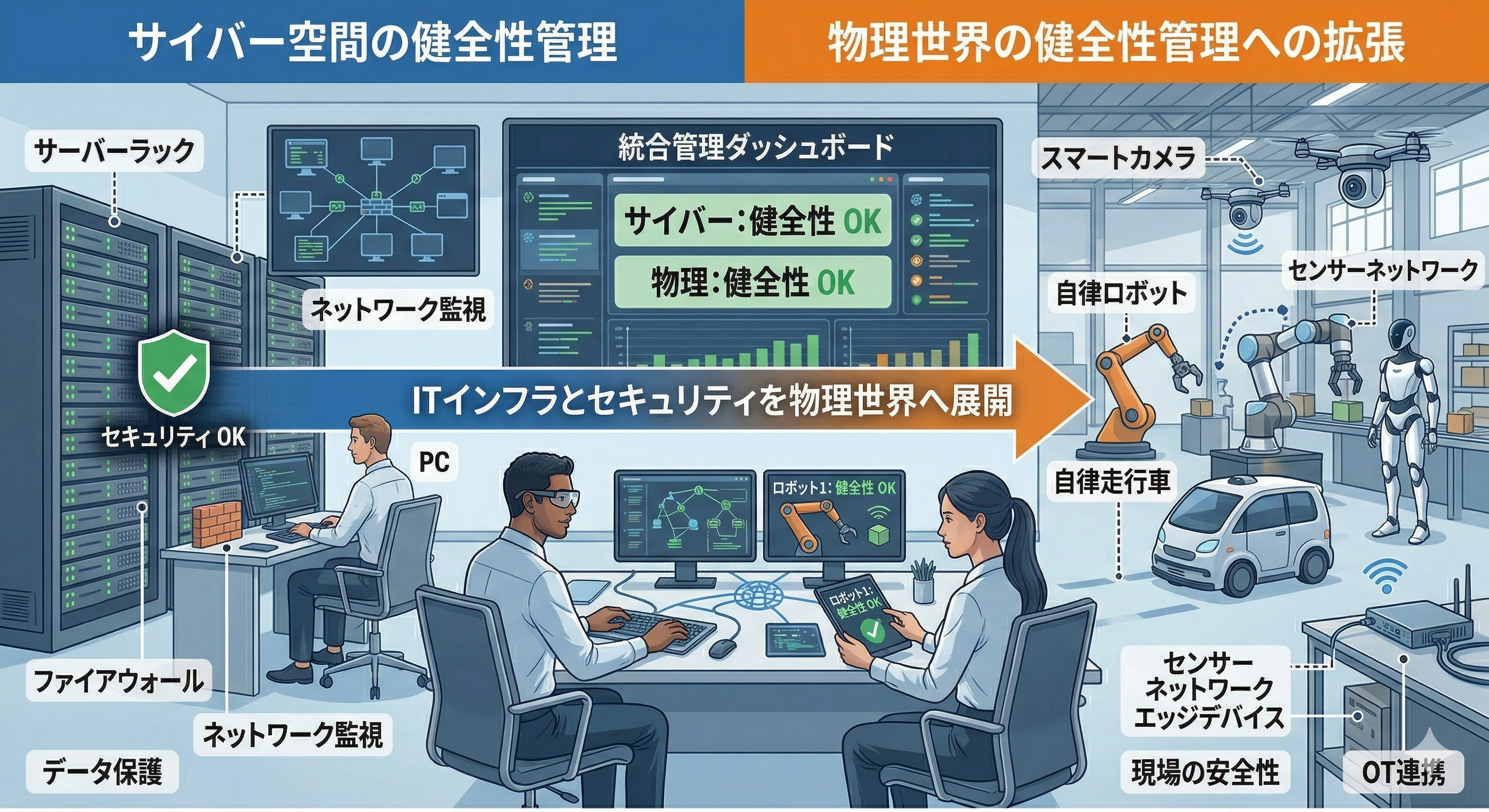
伊藤:企業運営の視点から捉えるならば、「これまでオフィスやデータセンターといったサイバー空間(デジタルの世界)で守ってきたセキュリティやネットワークの健全性を、物理世界にまで拡張して管理しなければならなくなる変化」と言えます。
管理対象が従来のIT機器だけでなく、自律的に動くロボット、無数のセンサー、自律走行車などに広がります。これらを包括した高度な運用体制を構築しなければ、事業全体の安全すら担保できなくなる。つまり、「デジタル領域で培った信頼性を、物理世界の隅々まで展開し、統合する」ことこそが、企業に求められるフィジカルAIへの対応だと考えています。
物理世界の課題と、AIによるパラダイムシフト
---生成AIが物理空間に進出することで、具体的にどのような世界が待っているのでしょうか。特に製造業や物流業など、モノや人が複雑に動く現場において、従来のシステムが抱えていた課題はどう解決されると考えますか?
伊藤:サイバー空間のAIと最も違うのは、「計算資源の不足」や「通信の遅延(ラグ)」といったITインフラの問題が、ロボットの動作不良や事故といった「物理的な事象」に直結してしまう点です。そのため、サイバー空間以上に高度なITとOT(OperationalTechnology:工場などの制御技術)の連携が必須になります。一方で、その壁を越えれば、私たちの生活や業務を自律的にサポートする世界が拓けます。例えば、ロボットという身体を持たなくても、人の行動パターンを学習して「帰宅後に自動でお風呂を沸かし、冷蔵庫の食材からメニューを提案して調理家電を制御する」といったスマートホームもフィジカルAIの一形態です。ビジネスにおいても、「こうなったらいいのに」という現場のニーズが、AIによって現実世界で自動的に実行されていくパラダイムシフトが起きます。
---製造現場の視点ではいかがでしょうか?
伊藤:従来の産業用ロボットは、「決められた動作を、決められた時間に、高速・高精度で繰り返す」ことを前提にプログラム(ティーチング)されてきました。しかし現在の製造業は、多品種少量生産や顧客ごとの個別要求への対応が求められています。製品が変わるたびに人間がロボットを再プログラミングするのは、もはや限界を迎えています。そこで、注文状況や素材の品質に合わせて、ロボット自らが考えて自律的に制御し、ものづくりを行う。この柔軟性こそがAI制御による最大のシフトです。
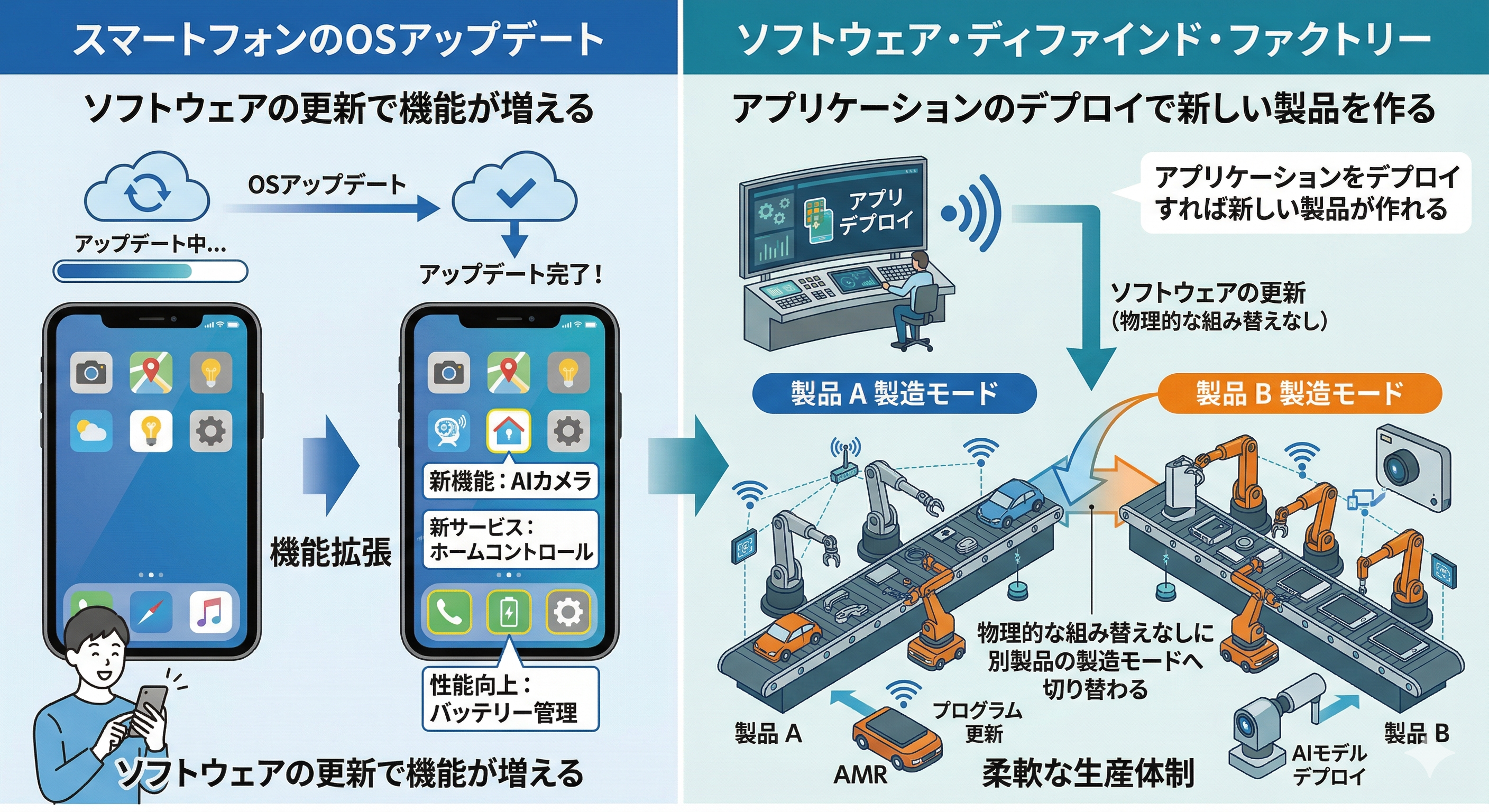
猪子:これまでは「作りたい製品に合わせて、ロボットのラインを人間が組み替える」という側面が強かったですよね。しかしフィジカルAIの導入によって、「ロボットが、これから作りたい製品に合わせて自らの動きを変える」という逆転現象が起きます。新しいアプリケーション(ソフトウェア)を配信するだけで、同じ工場で全く別の製品を作れるようになる。つまり、工場全体が「ソフトウェア・ディファインド(ソフトウェアによって機能が定義・変更される状態)」に近づいていくのです。海外の先進的なEV工場などでは、すでにそうした柔軟な生産体制の片鱗が見え始めています。
なぜ今、解決できるのか?
---ロボット技術自体は昔から存在していましたが、なぜ「今」、フィジカルAIとしてこれほどの注目を集め、従来技術の限界を突破できるようになったのでしょうか?
伊藤:最大のブレイクスルーは「Sim-to-Real」というアプローチの進化です。これは、仮想空間(シミュレーション)でAIを訓練し、その学習成果をそのまま現実世界(リアル)のロボットに適用する技術のことです。現在、材料の特性やロボット単体の物理的な挙動を、仮想空間上で極めて高精度に再現できるようになりました。実物のロボットや高価な試作品を用意しなくても、仮想空間の中でAIに何度でも失敗させ、学習させ、設計検証を高速に回すことができます。
---仮想空間でのシミュレーションが劇的に進化したことが鍵なのですね。
伊藤:その通りです。さらに、かつてはスーパーコンピューターを使って数十時間かかっていたような複雑な物理シミュレーション(例えば空気抵抗の計算など)も、AIを用いて「サロゲートモデル(代替モデル)」を作成することで、わずか数分から数時間に短縮できるようになりました。これにより、設計、開発、R&D全体のスループットが飛躍的に向上し、新しい製品やロボットを市場に投入するサイクルがかつてないスピードで加速しています。これが「今」、フィジカルAIが爆発的に進化している理由です。
おわりに
ここまで、AIが画面を飛び出して物理世界に進出する「フィジカルAI」の衝撃と、仮想空間でのシミュレーションがもたらすパラダイムシフトについて、弊社のエキスパート2名に話を聞きました。ソフトウェアの更新だけで工場やオフィスの機能が変わる未来は、決して遠いSFの話ではないことがよく分かります。
しかし、どれほど優秀な自律型ロボットやAIが登場しても、それを現場で動かすための「足回り(ネットワークやセキュリティ)」が脆弱であれば、ビジネスを安全に継続することはできません。
続く【後編】では、フィジカルAIを社会実装するための最大の壁となる「次世代ITインフラの要件」や、日本の現場力をAI時代にどう継承していくのかという「人の役割」、そして次世代インフラを実際に体感できる「共創の場(netone valley)」について深掘りします。ぜひご覧ください。
【後編】自律型ロボット実装の「壁」とは?フィジカルAIを支える次世代ネットワークと「人」の現場力
【メルマガ登録 受付中】
ネットワンシステムズでは、先端技術の活用アイデア・プロトタイピング事例をお届けする「netone Tech Innovation ニュース」を配信しています。ぜひご登録ください!
配信登録はこちら↓
https://www.netone.co.jp/digital-innovation/#mailmagazine
※本記事の内容は執筆者個人の見解であり、所属する組織の見解を代表するものではありません。


