

- ライター:伊藤 千輝
- ネットワンシステムズに新卒入社し、IoT/AIの技術の検証/ソリューション開発に従事。また、最新のAI技術をウォッチするために産学連携の取り組みを推進。
現在は製造業をターゲットにスマートファクトリーに向けたデータ収集・集約・加工・保存・活用のためのデータハンドリング基盤の提案導入支援。実際の顧客データを用いた分析支援を行う。
休日は弊社がスポンサーとして支援する大分トリニータをサポーターとして応援。
目次
はじめに
前編では、模倣学習(Imitation Learning)を軸に「知覚→推論→制御」をリアルタイムに回すフィジカルAIの本質と、Innovation Labでの二腕ロボットによる実装(ACTモデル、X‑Trainer)をご紹介しました。後編の本記事では、Innovation Labでの検証内容、浮き彫りになった技術的課題を整理し、ネットワークとコンピューティングを含むインフラアーキテクチャの解決策、そしてデジタルツインや基盤モデルを見据えた今後の展望までをご紹介します。
Innovation Labでの模倣学習キットの検証
弊社イノベーションセンターで実施した模倣学習の検証では、協働ロボット2台、教示用コントローラ、3台のカメラ(左右の手元および全体俯瞰)、実行プログラム(ACT)を備えたX‑Trainerを用い、二腕協調の段取りタスクを題材に、データ収集→学習→推論の一連の流れを検証しました。人による教示を約100回繰り返し、その過程で生じるやり直し、位置修正、姿勢調整などを含むデータからモデルを作成しました。推論では、机上の瓶の位置ずれに追従し、失敗時には再試行し、必要に応じて姿勢を調整して蓋を開け切るなどの回復動作を自律的にできることを確認しました。短期間の教示データであっても、模倣学習の強みである「複雑な段取りへの対応」と「環境変動への強さ」の有効性を確認できました。
模倣学習で「教える」AIロボットを現場に:フィジカルAIの未来像 前編 | ネットワンシステムズ
今回は、AIによるロボット推論に必要なネットワーク要件を把握するための検証も実施しました。X‑Trainerは基本構成の一部でワークステーションへのUSB接続を要しますが、現実運用ではコンピューティングリソースはデータセンターやクラウドなど、ネットワークを介してやり取りする必要があります。そこで、X‑TrainerのUSB接続部をIP化し、推論時にどの程度のネットワーク負荷が許容可能かを評価しました。
X‑TrainerのIP化
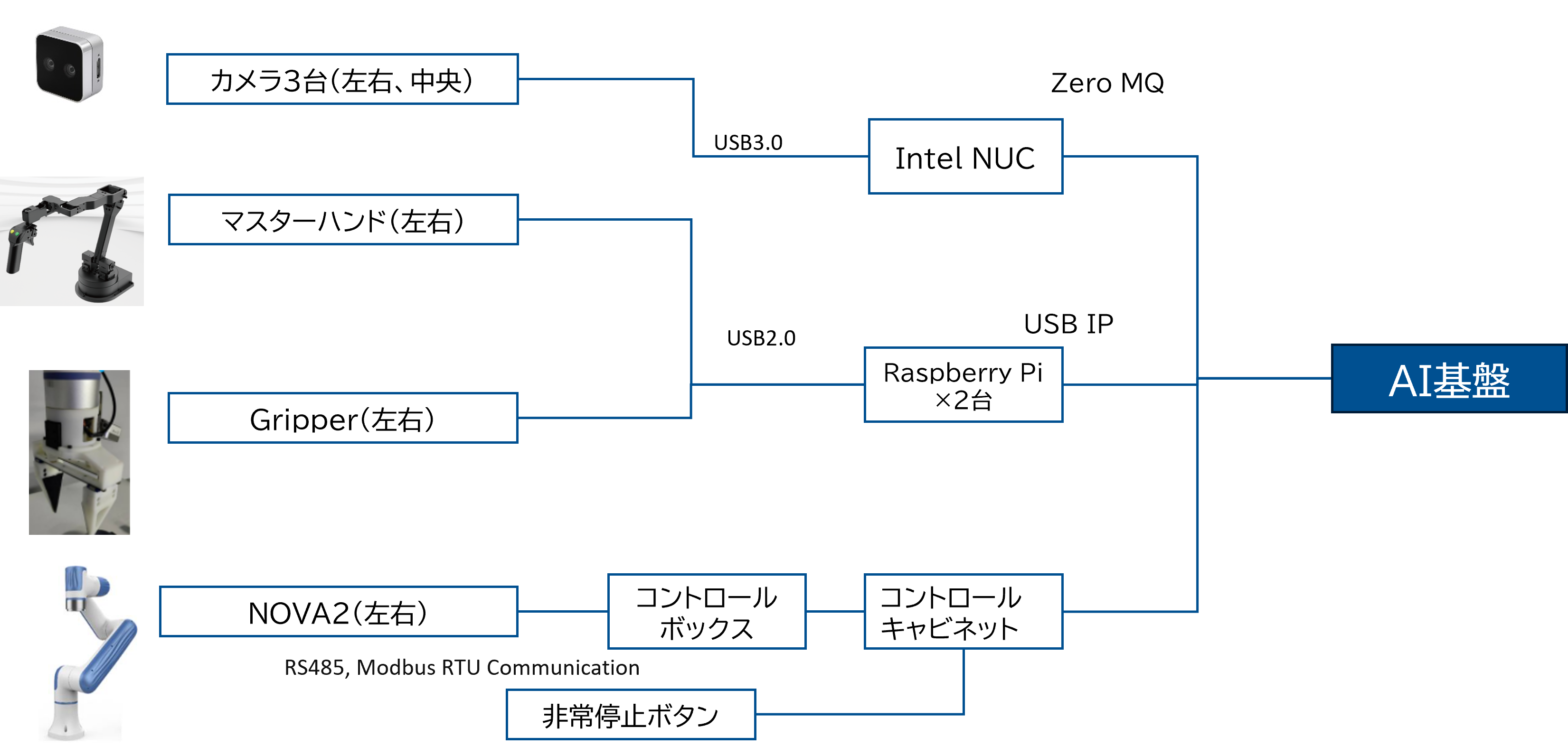
カメラや教示ハンド、グリッパなどのUSB接続のデバイスを、小型のPCであるIntel NUCやRaspberry PiをブリッジにしてIP化を行いました。通信にはZeroMQなどの軽量メッセージングでストリーム化し、ネットワークを経由してサーバーからセンサ・ロボットのデータを取得・制御できる構成を整えました。現場装置のIP化は地味ですが、AIによる遠隔推論の第一歩として欠かせない作業です。
ネットワーク負荷試験
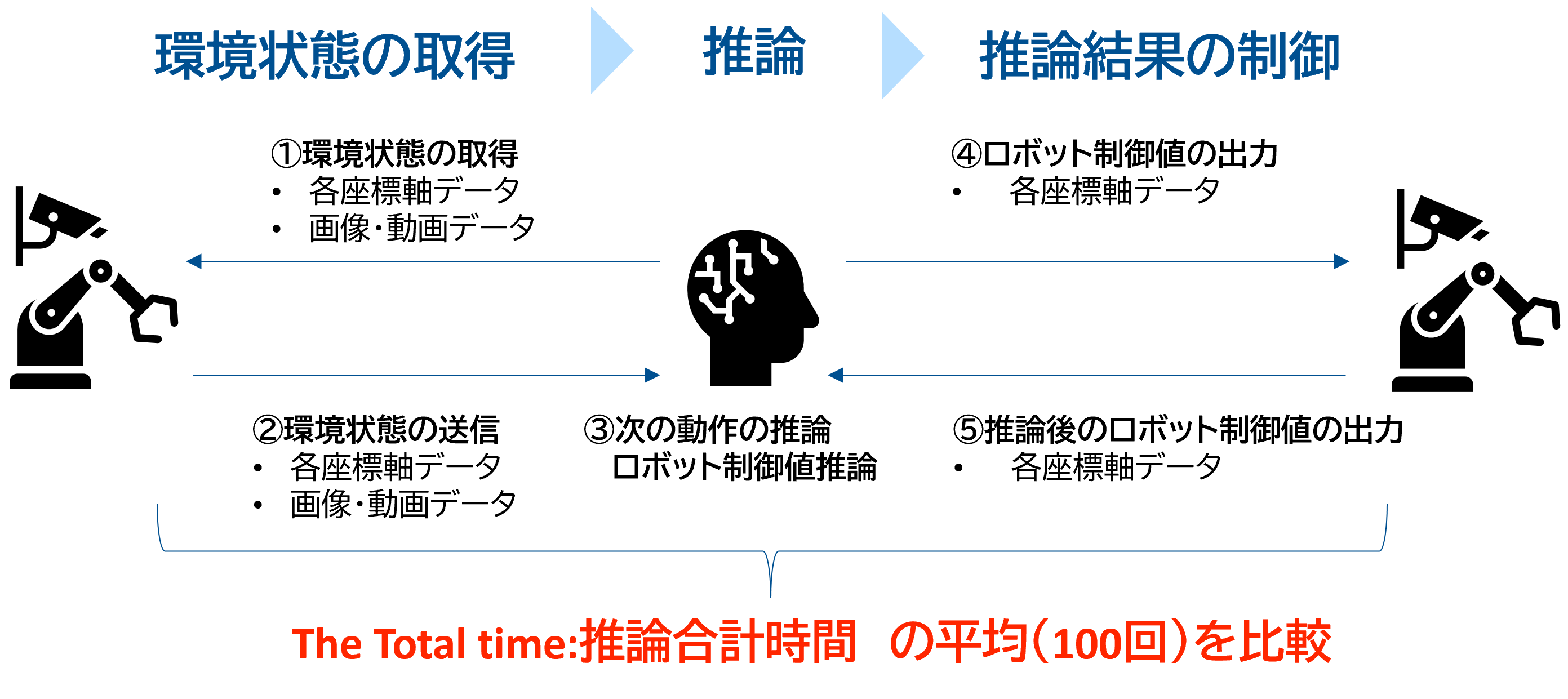
次に、ネットワークが推論品質に与えるインパクトを定量化するため、tcコマンドで遅延(10〜40ms)を付加して耐性を測定しました。模倣学習では、環境状態データを基に制御値をロボットに返す動作(図の①-⑤)を瞬時に推論して制御する動作を繰り返して動いており、間をネットワーク化したことでネットワークのリアルタイム性と安定性が重要になります。サーバーからネットワーク遅延を発生させ比較検証し、今回のロボットと通信環境でどれくらいの遅延まで動作が耐えられるかを確認しました。
模倣学習は成功失敗の評価が難しく、同じタスクだとしても物体の置く位置や角度でタスクが失敗することがあるため、先ほどの1回の推論動作(図の①-⑤)にどれくらいの時間がかかっているか、1秒間に何回推論を返しているのかを推論合計時間として推論の耐性能を比較しました。
検証結果と考察
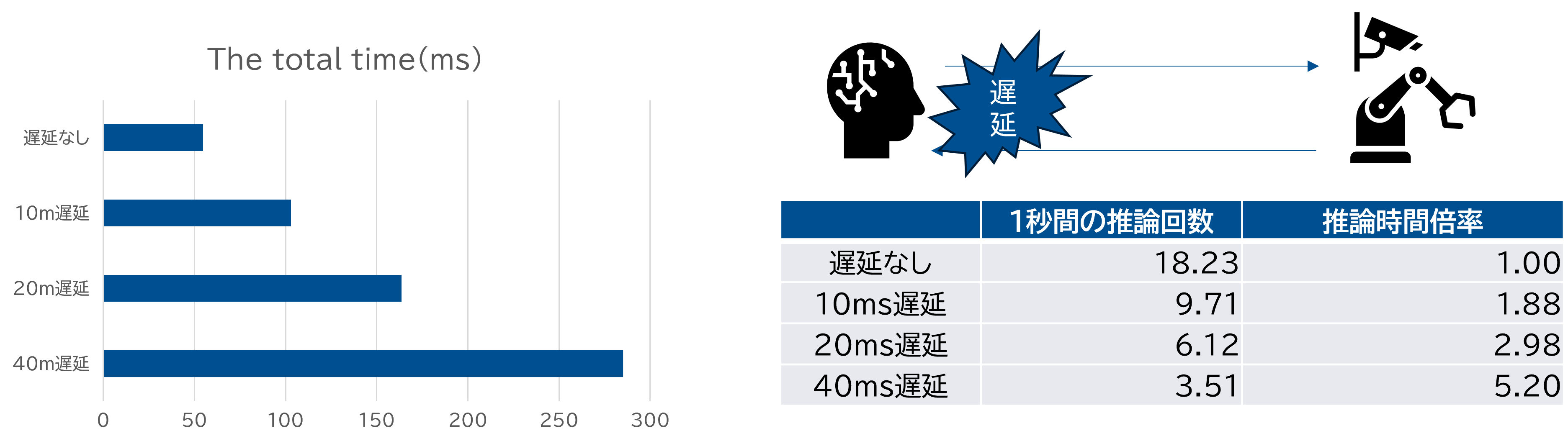
遅延なしでは推論頻度が約18.2回/秒、40ms遅延では約3.5回/秒まで低下。今回のXtrainerと通信条件では、20msを超えるとガクつきやタスク失敗が顕著になりました。
推論は状態を把握しながら次の動作の予測をオンラインで実行しロボットを制御しているため、1回の推論時間が長くなると、次の予測までに時間がかかり動作不安定になるのです。
この動作不安定が影響して推論のタスクが失敗しやすくなるという現象も確認できました。
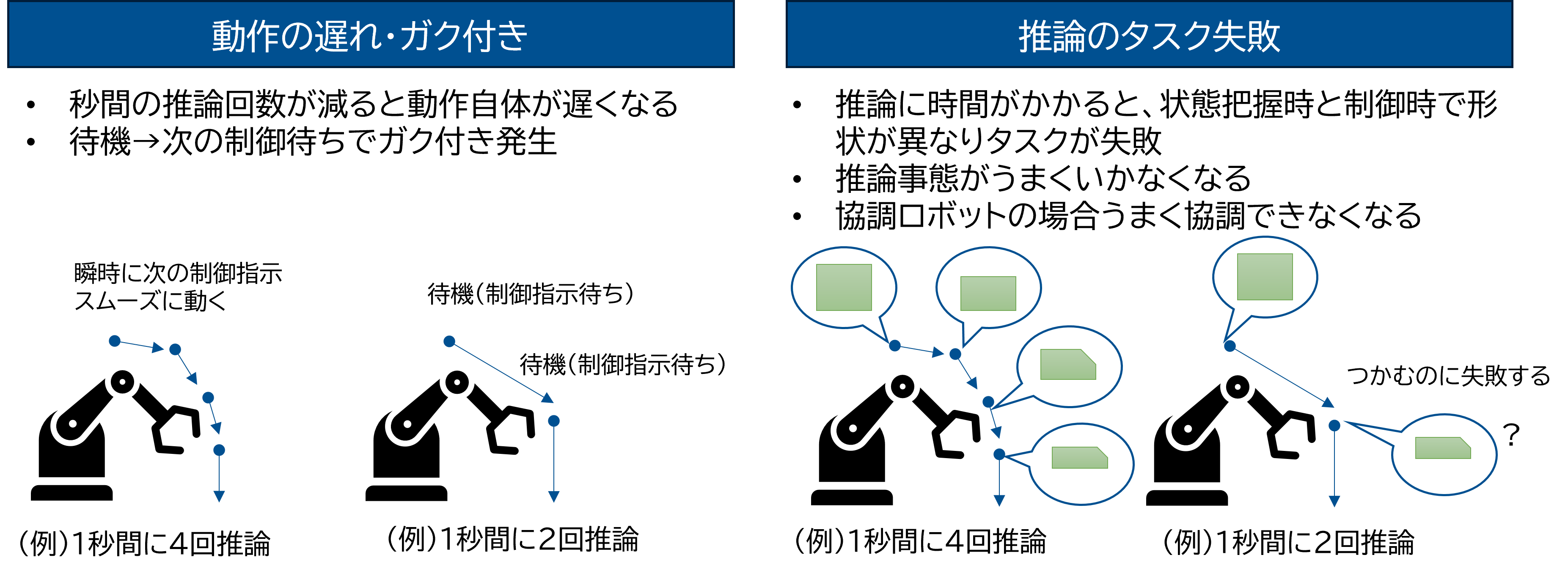
遅延の影響で、動作のガク付きが発生してしまうことで、推論自体も影響が出てきてしまいます。今回のロボット環境では遅延を20ms以内に収めることが現実的な解となりました。
フィジカルAI時代の課題と解決策
自律型ロボットが社会に普及するためには、大量のデータを処理し、かつリアルタイムに制御できるAIインフラが必要です。
しかし、すべての現場に高性能なGPUサーバーを設置するのはコストや運用の面で現実的ではありません。また、既存のデータセンターも電力供給の限界という課題を抱えています。
フィジカルAIの課題
フィジカルAI、特に「模倣学習(Imitation Learning)」を用いたロボット制御の実装には、大きく分けて「インフラシステム」「学習データ」「社会実装」の3つの側面で課題が存在します。
インフラシステムの課題
ロボットの推論や学習には高性能なGPUが必要ですが、各現場(エッジ)に高価なGPUサーバーを配置するのはコストがかさみます。また、特定の用途でしか使われないため、稼働していない「空き時間」が発生し、リソースの有効活用ができません。さらに、現場での保守運用には高度なIT人材が必要となり、展開の足かせとなります。一方ですべてをクラウドや中央データセンターに集約しようとすると、ネットワーク遅延の問題が生じ、ロボットのリアルタイム制御が困難になります。また、昨今のAIブームによりデータセンターへの電力供給が逼迫しており、インフラ拡張に時間を要するケースも増えています。
学習データの課題
模倣学習では、人間が実際にロボットを操作(教示)してデータを集める必要があります。これには多大な労力がかかり、十分な数を集めるのが容易ではありません。集めたデータで学習させても、光の加減や物の配置など、少しでも外部環境が変化すると推論精度が落ち、動作が不安定になります。また、複雑で長いタスクを学習させるには、成功例だけでなく失敗例やリカバリーのパターンなど、膨大なデータが必要となります。
社会実装の課題
模倣学習を現場に入れるときの課題は、アルゴリズムだけではありません。各拠点に高価なGPUを常設すると遊休が増え、電力・保守・人材確保の負担が大きくなります。通信遅延やジッターは制御品質に直結し、一般的なIP網では安定性に限界があります。さらに、学習データの拡張性や品質、セーフティ・セキュリティ、監査可能性など、社会実装に必要な“運用の骨格”をどう作るかが問われます。
解決するインフラシステムを考えてみる
今回の検証から、ロボット制御においては処理から動作までの時間が遅延20msecを超えると、動作が不安定になることが判明しました。
このシビアな要件を満たすため、インフラにはインターネットのような混雑する回線ではなく、IOWN APNのような低遅延・安定帯域の「専用道路」が必要です。すべての処理を現場(エッジ)で行うのはコストが高すぎ、すべてをクラウドに送ると遅延します。解決策は「役割分担」です。瞬時の判断が必要な処理は「現場」、重い学習や高度な推論はIOWNで繋がった「分散データセンター」へオフロードします。重要なのは、ネットワーク越しに各地のGPUリソースを「束ねて」シェアする仕組みです。これにより、現場は身軽なまま、必要な時だけ高性能なリソースを活用でき、コストと性能を両立できます。
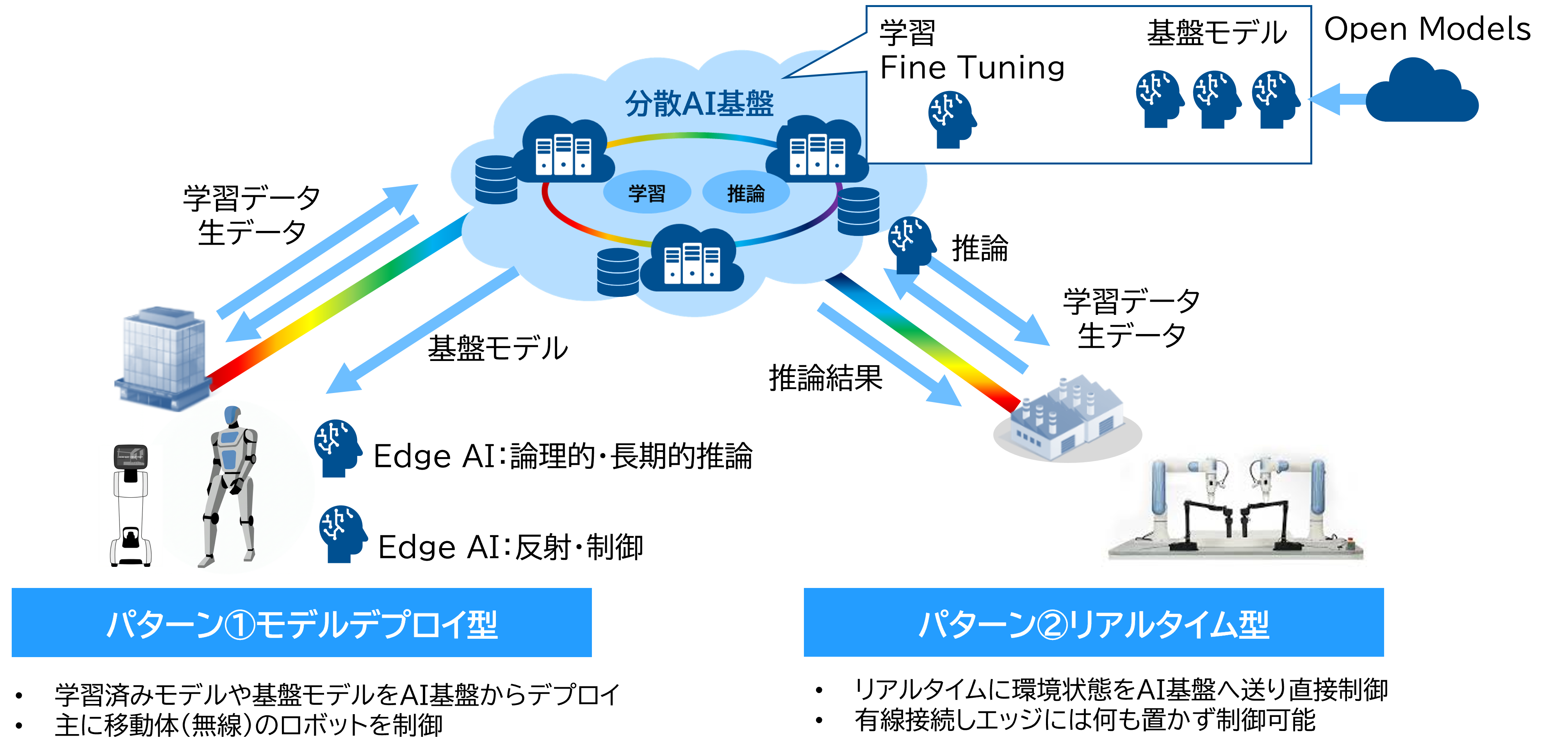
来るべき、フィジカルAIのシステムパターンとしては、①モデルデプロイ型と②リアルタイム型の2つあると考えています。
パターン①のモデルデプロイ型は、移動体などでGPUなどのエッジのコンピューティングリソースが備え付けられており、モデルをデプロイして動く仕組みになっています。エッジにモデルを備えるのは限界があるので、あらかじめ学習したモデルや、これから開発が進むであろうロボット基盤モデルを定期的にアップロードしてエッジで自律的に推論を動かす仕組みです。長期のタスクになってくるとモデルのアップデートは頻繁に行われるのでそこのネットワークの信頼性(無線環境も含む)も重要になってくると思います。
パターン②のリアルタイム型は、今回検証したように有線で接続されているため無線よりは安定したネットワークが提供できます。しかし、ロボットと推論するコンピューティングが離れた位置にあることで、その間のネットワークの信頼性(遅延、安定性)が求められるようになってきます。
2つに共通して言える要素としてはセキュリティやセーフティがカギになってきます。これまでは、サイバーの世界でとどまっていたインシデントが、物理世界にも影響することで、動作の安全性も考慮したシステム構築が必要になってきます。これはサイバーだけの対策だけでなくフィジカルの対策も重要になってきます。カメラなどを使ったフィジカルセキュリティの要素もここには含まれてきます。
弊社ではインフラシステムの課題に関してNTT西日本様と共同でIOWN越しのロボットの自律制御の検証も行いました。また、データの課題に関してデジタルツインや基盤モデルを活用したデータの増幅などもトライしております。今後定期的に技術情報をアップデートしていきたいと思います。
フィジカルAIの未来像
短中期は、産業・物流での単体自律+協調が着実に進み、サービスや点検の現場では対話と動作の融合が当たり前になっていくでしょう。中長期では、ロボット基盤モデル(Robotics Foundation Model)による汎化、ヒューマノイドのPoC拡大、社会インフラへの組込みが進みます。どの段階でも、低遅延ネットワーク、時刻同期、セーフティ/セキュリティ、データ品質、そして人との共生設計が、普及の鍵を握ります。
模倣学習の今後の展望
技術面では、模倣学習と強化学習のハイブリッドや自己学習/自己修復、カリキュラム設計による“少データ高性能”が現実味を帯びています。ドメインランダム化やオンライン適応、異常検知・回復動作の標準化で堅牢性を高め、現場KPI(推論合計時間・推論頻度・成功率)をSLOとして運用に落とし込む。“学習を止めない運用”が、安定稼働の近道です。
デジタルツインの活用
デジタルツインでは、仮想空間で環境・対象・動線・外乱を合成し、シナリオ網羅と反例生成でデータ拡張。カメラや物理の忠実度調整でSim2Realのギャップを詰め、ツイン上で安全柵・人流・段取り替えのA/Bテスト、ポリシーの事前検証、障害注入でレジリエンス評価まで行うことができます。現場に入れる前に“転ばぬ先の杖”を用意できるのが最大の利点です。
基盤モデルの活用
視覚言語・動画理解・行動計画の基盤モデルを下敷きに、少量の現場データで微調整するアプローチは、環境変動への強さを獲得する近道です。世界モデルや予測モデルを組み合わせ、先読み制御や長期計画、失敗回避の精度を高めることで、複雑タスクの成功率を押し上げます。模倣学習の“初期効率”と、基盤モデルの“汎化力”をうまく融合させるのがポイントです。
まとめ
フィジカルAIの社会実装は、モデルやアルゴリズム単体ではなく「ネットワーク(低遅延・時刻同期・ロスレス)」「コンピューティング(エッジ/クラスタ分担・分散最適化)」「データ/MLOps(品質・再現性・安全)」の総合設計に依存します。今後は、デジタルツインと基盤モデルを組み合わせ、少データで高性能・高信頼を実現する学習フローを洗練し、より長距離・多拠点・複雑タスクへ拡張していきます。現場の皆さまと共に、止まらず安全に動くフィジカルAIを育てていければ幸いです。
※本記事の内容は執筆者個人の見解であり、所属する組織の見解を代表するものではありません。


