

- ライター:荒牧 大樹
- 2007年ネットワンシステムズ入社し、コラボレーション・クラウド製品の担当を経て現在はAI・データ分析製品と技術の推進に従事。最近では次世代の計算環境であるGPU・FPGA・量子コンピュータに注目している。
目次
はじめに
ネットワンのテクニカルセンターで管理しているサーバ、スイッチ、ルータ等の電子機器の点数は約9,000点あり、ラックも300本ほどあります。この機器の管理は年一回の棚卸し管理で行っています。
しかしながら検証の為に突発的に機器の移動等が行われる場合があり、年一回の確認では移動された資産の場所を発見するのに時間を必要とする場合がありました。この問題を解決する為、高頻度での定期的な資産管理と資産の場所管理を考えています。
今回これを実現する為に、RFIDとロボットを利用した資産管理の自動化のPOCを作成しました。また、前回解説したInOrbitの利用例として、今回使用するロボットをInOrbitで管理・運用しました。
RFIDを使った資産管理について
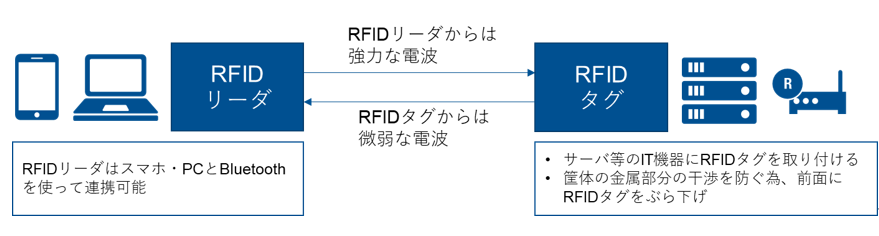
ロボットによる資産管理を自動化する為に、RFIDを使って資産管理を行います。RFIDは、RFIDタグの情報をRFIDリーダで読み取ります。RFIDリーダから電波を発射してRFIDタグから返ってくる反射波をスキャンし、RFIDタグを検知します。資産管理の為、ネットワン内のサーバやスイッチ等の電子機器にRFIDタグを添付します。しかしながら対象の電子機器は、金属物となり電波を通しにくい為、機器の前面にRFIDタグを添付しました。
今回利用したRFIDリーダは、Android・iPhone・PCとBluetoothで接続できます。RFIDリーダのメーカからは、各端末向けにサンプルアプリが提供されており、それを利用することでクライアントアプリの開発が容易にできるようになっています。
ロボットについて
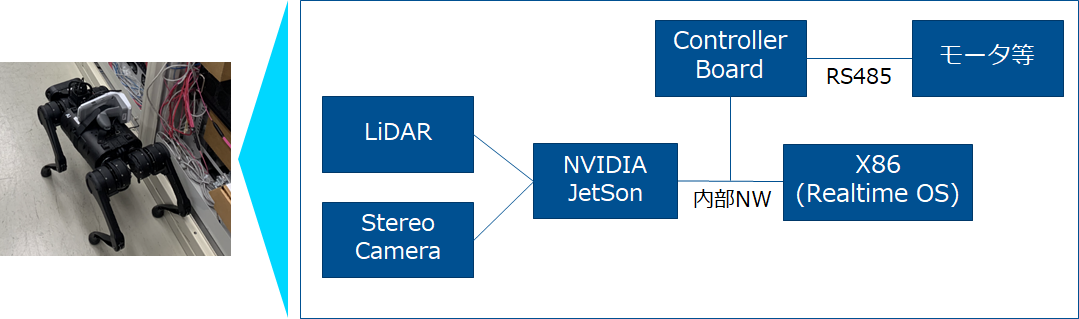
このRFIDリーダを装着してテクニカルセンター内を走行する為に、Unitree A1という犬型のロボットを利用しました。Unitree A1は、車型のロボットと同じ移動ロボットで、前後左右への移動ができ、車型のロボットで走行が難しい階段や悪路での走行が可能です。テクニカルセンターは通常の床の為、必ずしも犬型である必要は無いですが、カスタマイズ性の高さからUnitree A1を選択しました。
Unitree A1は、基本機能でコントローラのジョイスティックを利用して前後左右の移動や姿勢変更ができ、LiDARを利用して地図を作成しスマホアプリからゴールを指定することで目的地までの自動走行も可能です。
Unitree A1は開発環境も充実しており、GitHub上に独自APIやROSでの制御例が載っています。独自APIは、High LevelとLow LevelのAPIがあります。High Level APIは、Unitree A1の前進速度等の大まかな動作の指定と情報取得がAPIででき、Low Level APIはモータの制御等の細かな制御や情報取得ができます。
Unitree A1にはPCが搭載されており、LiDARやCameraが繋がっているJetson Nanoと、リアルタイムOSが搭載されているPCと2台搭載されています。LiDARやCameraはNVIDIAのJetsonと接続されており、ROSもJetson上で動作しています。
InOrbitを使ったロボットの管理
Unitree A1を前回紹介したInOrbitで管理します。
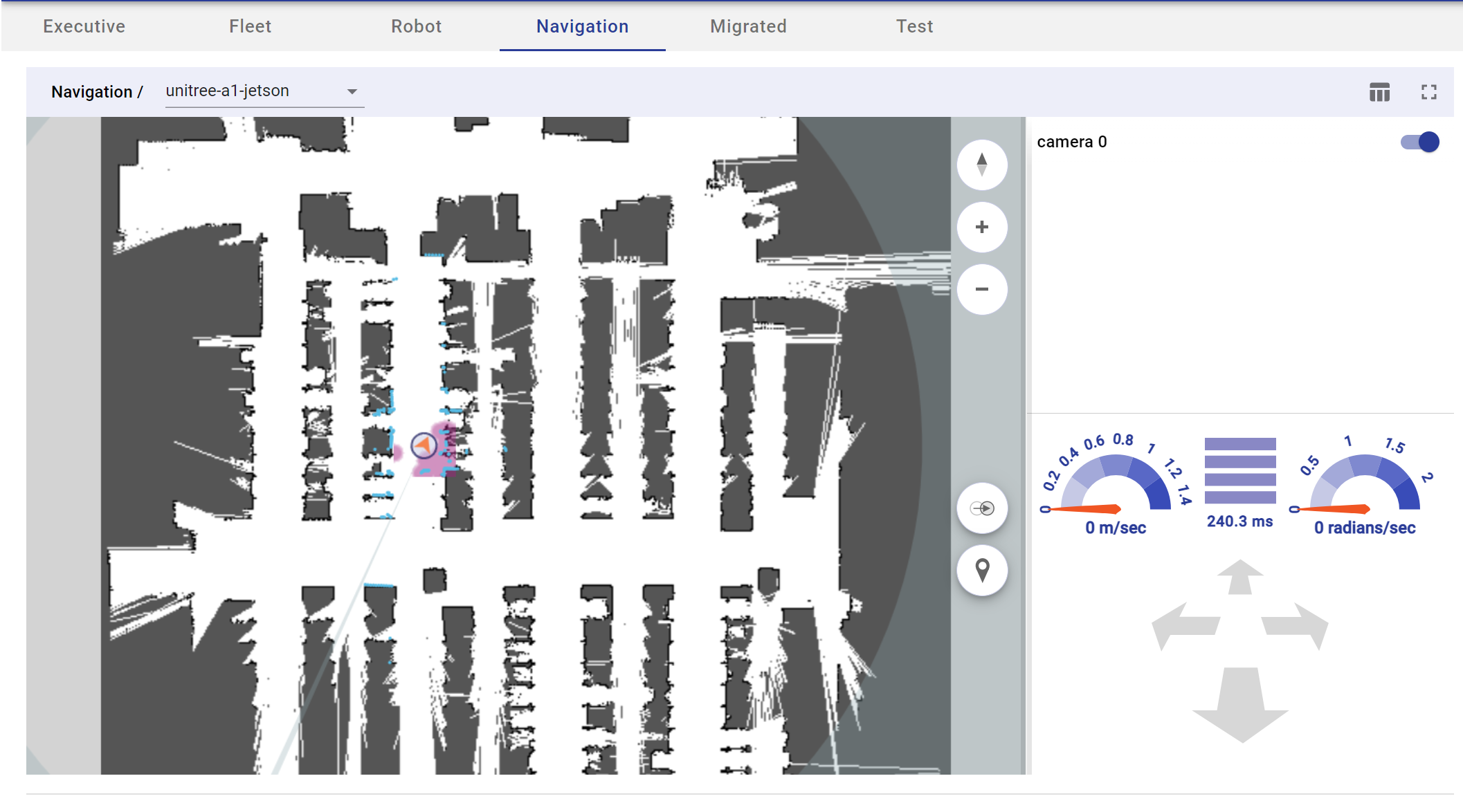
Unitree A1のJetson上ではROSが動作しており、InOrbitのAgentをインストールすると、自動的にCPUやメモリの情報を取得するのと同時にROSのTopic情報も取得します。InOrbitの管理画面に出てくるROS Topicを正しく指定するとInOrbitのNavigation画面で地図情報や、自己位置の情報、カメラ情報を表示できます。また、InOrbit上で指定したGoal位置へUnitree A1を走行させることもできます。InOrbitはROSで指定のTopicにセンサーデータ等がPublishされていれば、自動でデータを取り込むことができます。
今回Unitree A1の独自APIを利用してモータ等のセンサーデータをROS側にPublishすることで、InOrbit側でUnitree A1のセンサーデータの取り込みを行いました。
ロボットとRFIDリーダを組み合わせた資産管理
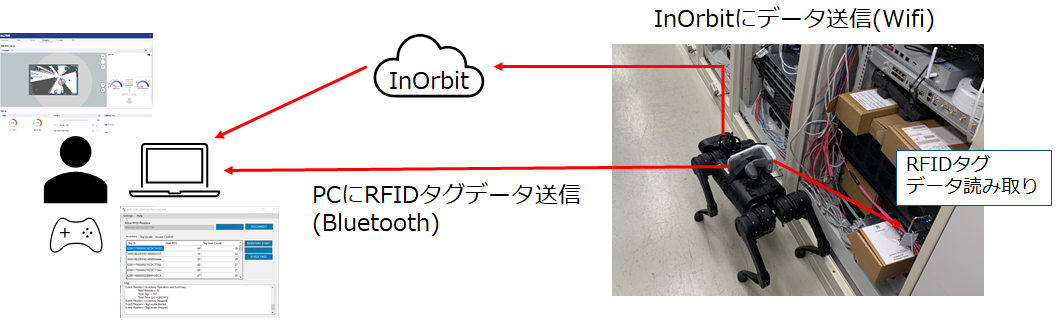
ロボットとRFIDリーダを組み合わせて資産管理を自動化する為に、Unitree A1の背中にRFIDリーダを搭載してラボ内を走行し、RFIDタグの情報を収集しました。PCとRFIDリーダはBluetoothを通じて接続を行い、RFIDリーダに添付されているサンプルアプリでRFIDリーダのRFIDタグの情報収集の収集を行いました。InOrbitを利用して動作の様子をリモートから監視し、走行のGoal位置の指示を行いました。
まとめ
簡易的な構成でロボットを使ったRFIDタグ情報の収集により、資産管理作業が行えることを確認しました。また、InOrbitを利用してこの作業がリモートで運用・管理できることも確認できました。
今回のテストは、POCで初期段階の確認です。今後はロボットが夜間等に定期的に巡回し、RFIDタグの情報を収集して、資産の所在を自動的に確認する仕組みを実装しようと考えております。これを実用化する為に、ロボットの定時巡回、資産管理システムとの連携、RFIDリーダとPCの接続方法の変更、ロボット位置等を利用した資産の場所管理などの機能追加を検討しています。
※本記事の内容は執筆者個人の見解であり、所属する組織の見解を代表するものではありません。


