目次
1.ロボットを取り巻く環境の変化
新型コロナ感染症の拡大を契機にテレワークが急速に普及し、多くの人が自宅やサテライトオフィスで大半の仕事をこなすことができるようになった。一方テレワーク・リモートワークの恩恵を受けられる人は限定的であることも否定できない。多くの職種では物理的にその場所にいなければつとまらない仕事も多い。人と人の接触の機会も頻繁に伴う。宅配、受付・配膳、運送、建設、医療・福祉、消毒の前線で働く人たちは、テレワークではその職務を全うできない。そのようなコアワーカー、エッセンシャルワーカーを支援する意味でロボットへの需要や期待は今後高まっていくことが予想される。
ロボットとは、元来は認識系、制御系、駆動系の3要素を合わせ持ち、与えられた目的を実行するために動作する装置・機械のことである。SF作家アイザック・アシモフのSF小説の中では、ロボットは、1.人間への安全性 2.命令への服従、3.自己防衛 を3原則として動作するものとされている。広義には、ドローンや自動運転自動車などもロボットともいえる。すなわち、飛ぶロボットがドローン、走るロボットが自動運転自動車である。
従来は、ロボットは工場の生産現場を中心に活躍してきた。産業用ロボットと呼ばれ、特定の環境のもとで特定の仕事を繰り返し正確に行うのがロボットの主な仕事であった。大量に高品質の製品を作るために利用されてきた。
一方、未来社会においては、日常生活の中で人間と共存しながら様々な環境で様々な仕事をするためにロボットが活躍することが期待されている。清掃、配膳、案内、消毒、歩行補助、荷物の搬送など日常生活のあらゆるところで活躍する日はそう遠くはない。人口減少、高齢化社会、自然災害の多発に加えて、人同士の距離を考慮しなければならない新型コロナウィルス感染症への対応も相俟ってその動きは加速するであろう。
ロボット技術も日進・月歩の変化をとげている。
AIや自己位置推定による地図構築技術などがロボットにも搭載され、自律的に環境を認識して、様々な仕事をするロボットへと進化している。様々な周辺技術の進化とともに、ロボット単体の中にすべての機能を埋め込むのではなくて、機能要素をネットワーク経由で分散化しそれらが連携して目的の機能を提供するという形態へ変化している。この考え方を“クラウドロボティクス”という。(下図参照)
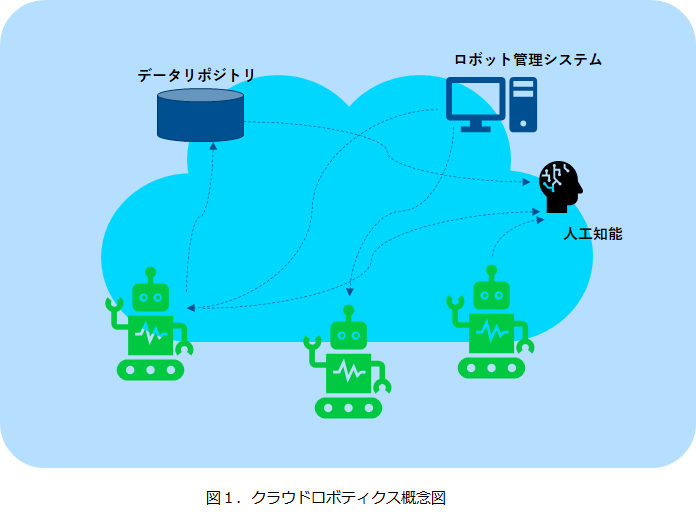
クラウドロボティクスでは、ロボットの機能要素が分散化され相互に連携しながら様々な環境の中で様々な用途の仕事を実行する。外部との通信から閉ざされていた環境で利用されていたロボットが、ネットワークを介して様々な情報や知識を交換するようになる。複数のロボット同士が協調・連携して動くパターンもある。たとえば企業の受付などで来客を受け付けるロボット、来客を目的の場所へ案内するロボットとの連携などである。
ロボットの機能のモジュール化・分散化の流れとして、ロボットのソフトウェアも変化してきている。ロボットの機能を部品として扱いそれらを共通のプラットフォームから活用するロボット・ミドルウェアという考えが進展している。代表的なものとしては、ROS、OpenRTMなどがある。AWSもROSと連携してロボットのシステム開発を支援するプラットフォームRobomaker™をサービスとして提供しはじめている。
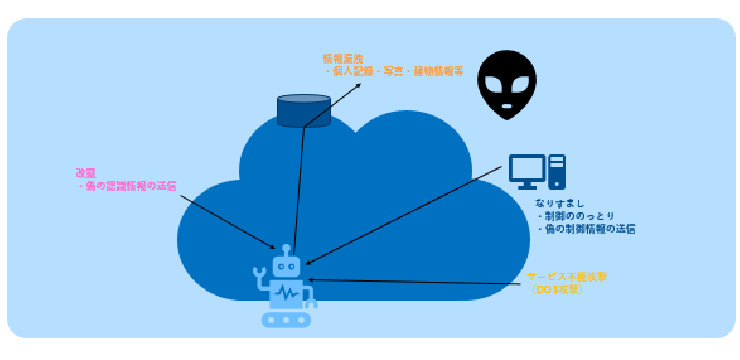
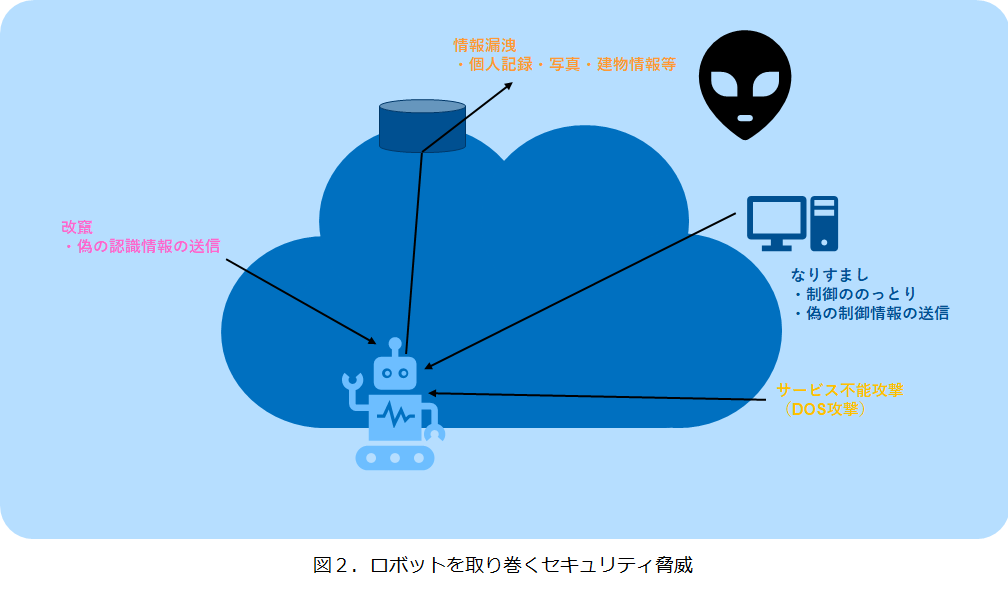
この動きが進展すると危惧されるのがセキュリティへの懸念である。悪意ある攻撃者によりネットワーク経由で攻撃され情報を搾取し機能を停止させられるだけにとどまらず、ロボットの制御を指示するような重要な情報が改竄され誤った制御指示をされるとその影響は非常に大きい。故意に誤った情報を認識させられるとロボットの制御や動作そのものに問題が出てくる。ロボット自体が人間の顔や音声、建物の構造などを認識しながら動くのでそれらの情報が流出すると、個人情報・プライバシー保護の観点でも懸念が出てくる。
2.ロボットのセキュリティを考慮する上での特徴とポイント
2.1. 対象となる資産が非常に多い
ロボットのセキュリティを考える上で大きな特徴のひとつは、関連する資産が非常に多岐にわたる点である。情報資産はもちろんのこと、目的の仕事を実現するための機能や仕事をする環境、対象となる物理資産も守るべき対象として考慮に入れる必要が出てくる。
ロボットのセキュリティ対策を検討するにあたっては、それらの資産の洗い出し整理が非常に重要になる。
情報資産には、ロボットがセンシングする情報、センサーが認識する環境情報、カメラが認識した画像、マイクが収録した人の音声などが含まれる。ロボットの状態を表す情報も非常に重要である。ロボットがセンシングした情報と状態が上位システムへ知らされ、その情報を分析することによる上位システムで次の動作計画が立てられ、制御情報が上位システムから下りてくるなどの流れである。ロボットの中に搭載されている制御コンピューターのOS・ミドルウェア、それらを管理するためのアカウント情報やシステムの動作記録なども重要な情報資産である。
ロボットが提供する機能も多岐にわたる。音声認識、画像認識、環境認識などの認識機能、腕が動作するためのマニュピュレーション機能、歩行・移動機能、認識情報を変換・分析・判断する機能、制御計画を立てる機能、制御目標を指示する機能などが含まれる。
物理資産としては、ロボット自身のボディ、アーム、足、センサーだけではなく、ロボットがサービスを提供する物理的な環境、把持する物体、移動する部屋やその中の様々な障害物、そして共生する人間・生物も考慮の対象となってくる。
2.2. ユースケース・通信フローの洗い出し・整理も重要
資産の洗い出しとともに重要な点は、資産同士のつながり・関連性を明らかにし整理していく作業である。
ロボットがある動作をするのにともなってどこでどのような情報が処理され、どこからどこへどのような情報が伝達されるかのユースケースと通信フローを洗い出す必要がある。
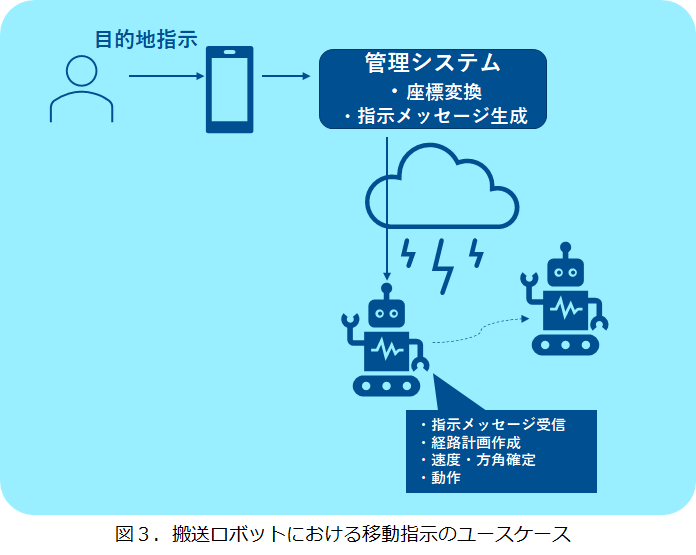
たとえば、管理者が搬送ロボットへ目的地への移動を指示する場合は、管理システムのUIへ目的地が入力されたあとに、その情報は管理システム内で座標変換され、移動指示メッセージが生成される。生成されたメッセージは、通信ブローカーに送信され、搬送ロボットが通信ブローカーからその情報を受信する。搬送ロボット内では、目的地までの経路計画を立てそれに従い移動速度や方向を台車機構に指示されロボットの移動が開始される。(右図参照)
実際に搬送ロボットが目的地へ到着するまでの間は自己位置や状態など情報を頻繁に管理システムとの間で交換しながら動作することになる。
2.3. 網羅性のある脅威分析・リスク評価が必要
セキュリティ対策も顕在化した脆弱性に対して対症療法的に対処することだけでなく、網羅的に脅威の洗い出しとその脅威によるリスクを相対的に可視化して対策を検討していくことが重要になる。
ロボットのセキュリティも、サイバーセキュリティと同様にすべての脅威を対策してリスクをゼロにすることは不可能である。網羅的に脅威の洗い出しとそのリスク・影響を相対的に可視化して対策を検討していくことにより、優先順位をつけて対策を打つことができる。また未対策の部分を残留リスクとして把握することができる。
サイバーセキュリティにおいても脅威分析の手法・フレームワークはいくつか存在するが、ロボットの場合は、
- 開発者視点・利用者視点での脅威の洗い出し・分類
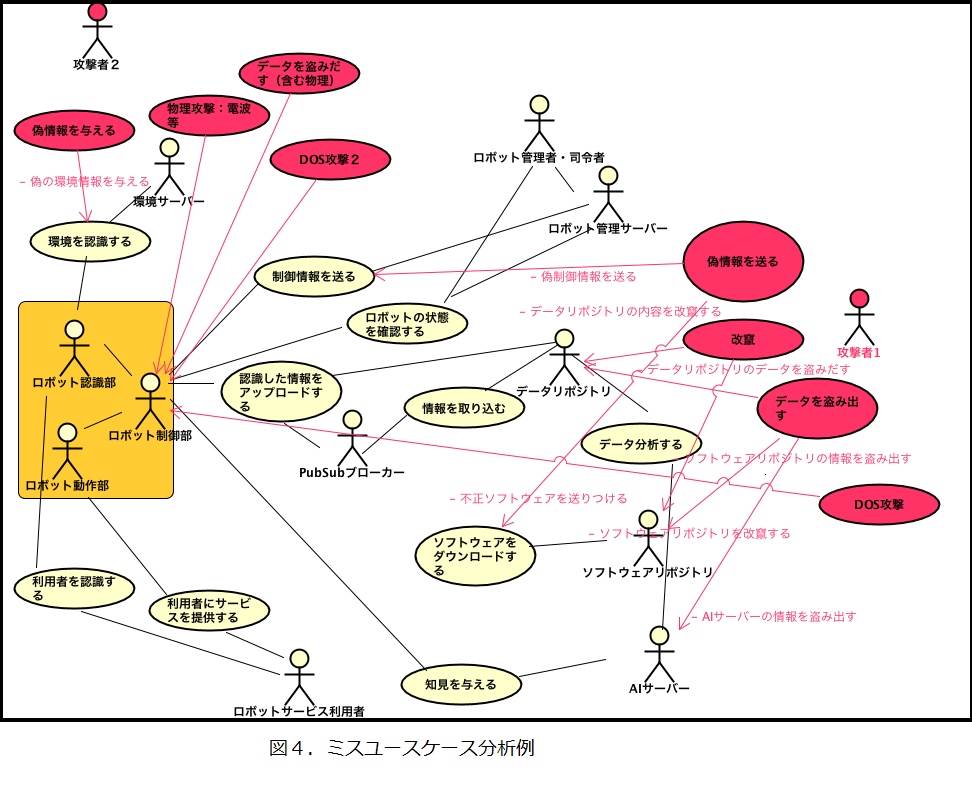
- 利用形態と攻撃パターンの分析(ミスユースケース分析)(右図参照)
- 脅威の相互関係の分析(アタックツリー分析)
- ネットワーク構成・通信フローの整理
など複合的に用いて脅威とそれによるリスク・影響を可視化していくことが重要になる。
筆者が所属するネットワンシステムズでは、公立大学会津大学と連携しサービスロボットのセキュリティにフォーカスした共同研究を進めてきている。本稿で紹介している内容の詳細も2019年5月からサービスロボット・セキュリティガイドライン第1版として公開している。(下記URL参照)
https://rtc-fukushima.jp/technical/3170
また、本年度からロボット革命イニシアティブ協議会(RRI)に設置されたロボットセキュリティ調査検討委員会でもロボットセキュリティとその周辺課題(物理空間とサイバー空間の相互影響・セーフティとの関係性など)の協議が開始されており、その内容も今後紹介していく予定である。
※本記事の内容は執筆者個人の見解であり、所属する組織の見解を代表するものではありません。


