- ナレッジセンター
- 匠コラム
CATVアクセスネットワークの将来像 ~分散型アーキテクチャへのアプローチ~
- 匠コラム
- ネットワーク
ビジネス推進本部 応用技術部
コアネットワークチーム
渡辺 義和、大澤 能丈
CATVインターネットでは長くHFC (Hybrid Fiber Coaxial) 構成でDOCSIS (Data Over Cable Service Interface Specifications) に準拠したCMTS (Cable Modem Termination System) が主に使用されていましたが、2011年に登場したCCAP (Converged Cable Access Platform) アーキテクチャにより、北米ではインターネットデータに加えて、音声、そしてビデオデータを1台で処理する統合アーキテクチャへと移行が始まりました。
さらにFTTH (Fiber To The Home) サービスの普及やDOCSIS3.1といったギガbps越えの通信規格の策定に伴い、通信速度のニーズが急速に高まってきており、柔軟性の高いインフラへの拡張が必要となってきています。
これまでのセンター型アーキテクチャに加え、分散型アーキテクチャの考え方が出始めてきており、本書ではDCA (Distributed CCAP Architecture) と呼ばれる分散型アーキテクチャの概要について紹介します。
DCAとは
CATVインターネットではCMTSを使用してサービスを行っています。さらに1つの筐体に高速データ通信とビデオ配信を統合したCCAPアーキテクチャへと変革していきました。これらCMTS / CCAPはCATV事業者のヘッドエンド設備に設置してセンター管理されていました。DCAはこのCMTS / CCAP機能の一部を切り出して、ノード側(つまり加入者に近い伝送路エリア)に分散して設置する構成を指します。
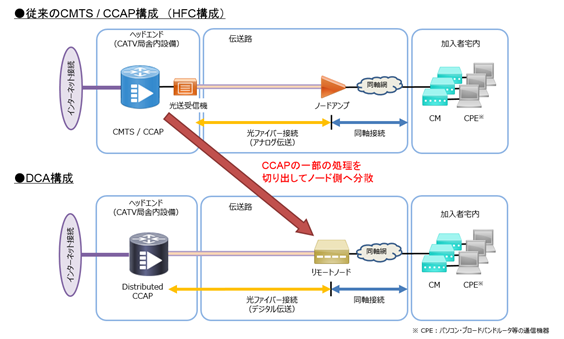
図1. 従来のCMTS / CCAP構成とDCA構成
CATV事業者は、現在多くの課題に直面しています。インターネットデータおよびビデオのトラフィックが年々増加しており、高速通信への要求が早いペースで進み、設備投資を迫られています。また、それに伴い、設置スペース、電力も必要となります。次章ではDCAにおけるこれらの課題に対するメリットを紹介します。
DCAのメリット
以下に、DCAにおけるメリットを挙げます。
①伝送路品質の向上
従来のHFCでは、デジタル変調後に周波数搬送を行うRF(Radio Frequency)方式での通信であり、途中経路機器による電力が必要とされ、また、アナログ伝送のため比較的ノイズが発生しやすい方式と言えます。
DCAによってRF方式での伝送距離が数百メートルから数キロメートル程度になり、RF網の距離が短く済むため、少ない送信電力での運用が可能となります。 それによって減衰やノイズによる干渉が少なくなることで、ビットエラーの減少やSNR(Signal Noise Ratio:信号対雑音比)値が向上します。
②デジタルファイバーとの接続性
従来のHFCで使用されているファイバー接続はアナログ伝送であり、光ノイズの影響によるSNR低下の要因があります。
DCAではヘッドエンドからノードまでの接続が、イーサネットあるいはFTTHで使用されるPON(Passive Optical Network)のようなデジタルファイバーの接続になります。デジタルに置き換えることで、低コストで光ノイズの影響を受けず、SNRが向上することで、キャパシティ増強につながります。また接続形態によっては長距離伝送も可能となます。さらに、安定性も向上し定期的なメンテナンスの削減による運用負荷の軽減といったメリットも挙げられます。
③キャパシティおよびパフォーマンスの増強
伝送路品質の向上により、減衰や物理的な距離による障害が少なくなりパフォーマンス改善につながります。これはDOCSIS3.1でサポートする1024QAM ※1 や4096QAMといった高い変調方式を利用することができ、さらなる高速化が見込めます。
※1. QAM:変調方式の一種。数字が大きいほど一度に伝送できる情報量が多い。
④ノードあたりの加入者数の削減
加入者当たりの利用帯域を増加させるために、よりモデム接続数の少ないノード(サービスグループ)への移行が求められます。CATVインターネットにおいても1つの帯域を複数の加入者で共有するシェアード接続であり、1ノードにおけるケーブルモデムの接続台数を減らすことで、1モデム当たりの利用帯域が増加することになります。
DCAではノード側に装置を設置することで、サービスグループあたりの加入者数の削減へ柔軟に対応ができます。これによってサービスグループのキャパシティ増強につながります。また、障害の発生頻度や影響度を少なくし、原因切り分けを迅速化することでプラント障害の低減にもつながります。
⑤ヘッドエンドスペースと電力削減
従来のCMTS / CCAPのような高密度なポートを持つ装置においてサービスグループの数を増やすには、ラインカードのようなハードウェア増設が必要となりますが、ヘッドエンドにおけるラックスペースといった設置場所と消費電力の追加が必要となります。DCAではノード側に装置を設置することで、ヘッドエンドにおけるスペースと消費電力を削減することができます。
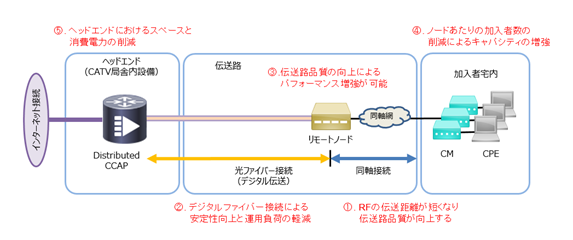
図2. DCAにおけるメリット
2種類のアーキテクチャ ~Remote MAC-PHYとRemote PHY~
DCAの根本的な考えはCMTS / CCAPの一部の機能をリモートノードに実装することであり、その機能実装によって複数のアーキテクチャに分類されます。リモートノードは電柱への設置や、集合住宅のラックへの設置等、加入者宅に近い場所(言い換えるとヘッドエンドから離れたところ)に設置されます。
以下、DCAの代表的なアーキテクチャである「Remote MAC-PHY」と「Remote PHY」について紹介します。
①Remote MAC-PHY
Remote MAC-PHYはDOCSISにおける MACレイヤー(Media Access Control:リンクレイヤー層)と PHYレイヤー(Physical:物理層) をリモートノードにて処理する分散型のアーキテクチャとなります。Remote MAC-PHY自身は米CableLabs®での仕様化はされておらず、構成を明記したテクニカルレポートが公開されているのみとなります。
Remote MAC-PHYにおけるリモートノードは、RMD(Remote MAC-PHY Device)と呼ばれ、DOCSISに係るほとんどの処理を行うため、小さなCMTSという見方もできます。そのため、RMDはがミニCMTSあるいはコンパクトCMTS等と呼ばれることもあります。
構成要素としては、ノード側に配備されるRMDに加え、複数のRMDを終端するヘッドエンド/ハブに分けられます。RMDとヘッドエンド/ハブ間はイーサネットフレームが転送されるため、コンポーネント間の物理リンクは、イーサネット(1Gや10Gイーサネット)やPON(GE-PONやG-PON等)といったデジタル変調されたオプティカルリンクで接続されます。そのため、ヘッドエンド/ハブで使用される機器は汎用的なルータあるいはL2/L3スイッチ、またはPONにおけるOLT(Optical Line Terminal:光加入者線終端装置)といった機器が使用され、比較的安価にかつシンプルに構成することが可能となります。
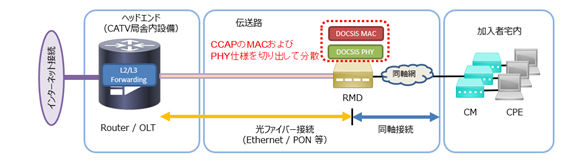
図3. Remote MAC-PHY構成
②Remote PHY
Remote PHYは、DOCSISにおける PHYレイヤーをリモートノードで処理する分散型のアーキテクチャとなります。 Remote PHYのシステムは、CCAP CoreとRPD(Remote PHY Device)という2つのコンポーネントから構成され、コンポーネント間の物理リンクはデジタル変調されたオプティカルリンク (10Gイーサネット、PON等) を使用します。Remote PHYは別名MHAv2(Modular Headend Architecture version 2)とも呼ばれており、米CableLabs®でRemote PHY Specification(CM-SP-R-PHY)として仕様化されています。
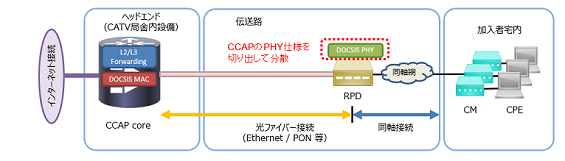
図4. Remote PHY構成
またコンポーネント間の通信は、IPネットワーク上で張られた仮想的なトンネルを使用します。ダウンストリーム用のトンネルインタフェースとしてはR-DEPI(Remote Downstream External PHY Interface Specification)が、アップストリーム用のトンネルインタフェースとしては、R-UEPI(Remote Upstream External PHY Interface Specification)が定義されています。
CCAP Coreは、DOCSIS MACより上のレイヤーの処理と、現在のEdgeQAM ※2 が行っているビデオストリームの処理全般を行います。一方、RPDは、基本的にはDOCSIS PHYの処理と、ビデオストリームでは簡単なジッタ調整のみを行います。また例外的に、PHYの範囲を超える処理も一部想定されています。(DOCSISのストリームから、帯域要求のフレームのみを取り出して、通常のデータフレームとは、別のトンネルから送信する事で、制御信号の優先度を上げる等)尚、処理を司る部分は、上記の通り分散されますが、CPEや他のDOCSISのインフラから見た場合、DOCSISの処理上は透過的に見えます。
※2. EdgeQAM:ビデオストリームをQAM信号に変換するゲートウェイ装置
導入に向けた課題
DCAの登場により、分散アーキテクチャ固有の新しい課題についても、検討の必要があります。主な内容は以下の通りです。
①オペレーション面での役割分担の明確化
アーキテクチャが分散化する事で、ヘッドエンド内にあった機材の一部が、ノード側に設置される事になります。一般的には、ヘッドエンド内で作業するエンジニアと、ノード側で設置作業をするエンジニアは異なっており、所有しているスキルセットも違う事から、運用全体を考えた時のそれぞれの役割分担や、作業内容を、明確化しておく必要があります。
②運用手法の確立
万が一の障害に備え、リモートノードのアクセス方法を確立しておく必要があります。また、リモートからもアクセス不可になる場合を想定し、ローカルでの作業手法も確立しておく必要があります(コンソールアクセスや、フィールドエンジニアによるLEDでの切り分け等)この他にも、リモートノード側の機能を活用しての、障害検知手法の確立等が必要になります。
③ファシリティ面での要件整理
リモートノードを設置する場所や、機器への給電方法について検討が必要となります。
④高可用性やサービスに依存するポイントの整理
分散構成に移行する事で、従来と比較して障害ポイントが変わる可能性があります。また冗長構成を組む上での必須条件や、バックアップ・リストア手法も変わる可能性があります。またL2VPNのサービスを提供している場合は、DCAのアーキクテチャの違いによって、終端ポイントが変わってきます。
⑤運用システムの改修、影響範囲の検討
分散化の影響で、物理機器の点数が、一時的に増える可能性があります。このため、分散している機器をどう監視・管理するか等の検討が必要になります。また既存の運用システムで、ノースバンドAPI等を活用している場合は、API自体が分散構成に対応しないと、正常に動作しない機能等が出てくる可能性があります。
⑥CINの要件定義
DCAのアーキテクチャでは、ヘッドエンドとノード間を結ぶネットワークは、CIN(Converged Interconnect Network)と呼ばれています。このネットワークの品質がDCAのサービス内容にも影響するため、スループット・レイテンシ・ジッタ等の品質条件や、冗長リンクの切り替え時間、ロードバランスの有無、マルチキャストのサポート等、サービス内容に合わせた、CINの要件定義が必要になります。またCINは、10Gイーサネット等を利用してポイントtoポイントの構成にするか、PONの様なシェアード構成で、オーバーサブスクリプションの状態にするかに依っても、利用出来る通信帯域に違いが生じます。
⑦CCAPの仮想化、アクセスネットワークの統合
現在、CCAPプラットフォームの仮想化も検討され始めています。但し、アクセステクノロジー(DOCSIS、PON等)では、PHYレイヤーのサポートが必須のため、機能の全てをソフトウェア化する事は難しく、専用ハードウェアが一部残る形で、仮想化されると予想されています。
このため、ソフトウェア化が難しいPHYの機能を外に切り出すDCAへの移行は、CCAP仮想化に向けたファーストステップとして捉える事が出来ます。また、こうした流れを足掛かりにして、Cableプラットフォームにおける、SDN (Software Defined Networking)・NFV (Network Function Virtualization) の取り込みや、アクセスネットワーク(DOCSIS、PON)の統合等も期待されています。
まとめ
このようにDCAの主なアーキテクチャ(Remote MAC-PHY、Remote PHY)を紹介しました。北米では今まさにDCA導入の機運が高まっており、2016年9月に開催された北米のCATVの展示会でも各社DCAのソリューションを出展しています。トライアルを経て2017年以降本格導入が進んでいくと予想されます。日本では、北米とは背景が異なりますが、FTTHを有効活用する手段として注目され始めています。
弊社では引き続きDCAを初め、CATVアクセスネットワークの動向について情報収集に努めて参ります。ご興味ございましたら担当営業までお問い合わせ下さい。
関連記事
- 参考文献
Distributed CCAP Architectures Overview Technical Report - ネットワンシステムズ – 匠コラム –
次世代CATV規格DOCSIS3.1の幕開け
執筆者プロフィール
大澤 能丈
ネットワンシステムズ株式会社 ビジネス推進本部 応用技術部 コアネットワークチーム所属
1999年 ネットワンシステムズ株式会社入社
応用技術部門にて映像配信やCATVインターネット製品の技術者として従事
- CATV総合監理技術者
- ネットワークスペシャリスト
- CCNP
渡辺 義和
ネットワンシステムズ株式会社 ビジネス推進本部 応用技術部 コアネットワークチーム所属
2002年 ネットワンシステムズ株式会社入社
応用技術部門にてCATVインターネット製品の技術者として従事
- CATV総合監理技術者
Webからのお問い合わせはこちらから
ナレッジセンターを検索する
カテゴリーで検索
タグで検索